高精度地圖 未來自動駕駛的核心基石與演進藍圖
在自動駕駛技術飛速發(fā)展的今天,高精度地圖已不再僅僅是電子導航的升級版,而是演變?yōu)橹诬囕v感知、決策與控制的核心數(shù)字基礎設施。它通過與計算機軟硬件的深度協(xié)同,正在重塑未來出行的安全與效率格局。
一、高精度地圖在自動駕駛中的核心作用
- 超視距感知與定位:高精度地圖提供了厘米級精度的車道線、交通標志、路沿、坡度曲率等靜態(tài)環(huán)境信息,作為先驗知識,極大彌補了車載傳感器(如激光雷達、攝像頭)在惡劣天氣、復雜場景或信號遮擋下的感知局限,實現(xiàn)穩(wěn)定、可靠的高精度定位。
- 安全決策與路徑規(guī)劃:地圖不僅包含幾何信息,還集成了豐富的語義層(如車道屬性、交通規(guī)則、限速信息)。這使得自動駕駛系統(tǒng)能提前預知前方道路結構,進行更長遠、更合規(guī)的軌跡規(guī)劃,例如提前選擇最優(yōu)車道、預判合流區(qū)域,從而提升行駛的平順性與安全性。
- 協(xié)同感知與車路云一體化:高精度地圖是連接車、路、云的“數(shù)字紐帶”。通過云端地圖的實時更新與分發(fā),車輛可以共享動態(tài)交通事件(如事故、施工、擁堵),實現(xiàn)群體智能,為高級別自動駕駛提供協(xié)同決策基礎。
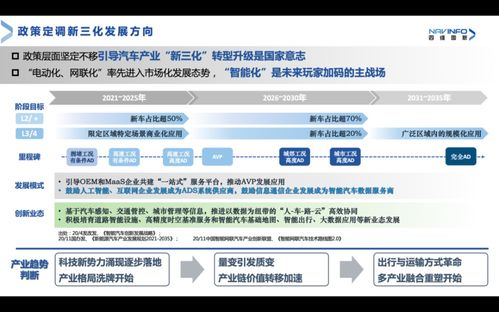
二、發(fā)展趨勢:與軟硬件開發(fā)的深度交融
- 動態(tài)化與實時更新:未來地圖將向“活地圖”演進。通過與車載傳感器數(shù)據(jù)的實時融合,以及利用眾包更新技術,地圖的更新頻率將從“天級”邁向“分鐘級”甚至“秒級”。這要求背后的云計算平臺、數(shù)據(jù)壓縮與傳輸算法(軟件)以及車載通信模塊(硬件)具備強大的實時處理與低延遲通信能力。
- 端云協(xié)同計算架構:完全依賴云端更新存在延遲和網絡風險。因此,趨勢是構建“車端輕量化地圖引擎+云端大數(shù)據(jù)平臺”的協(xié)同架構。車端硬件(如高性能域控制器)需具備強大的本地計算和存儲能力,以快速調用和融合本地地圖數(shù)據(jù);云端則負責海量數(shù)據(jù)的聚合、建模與分發(fā)。相應的開發(fā)重點在于高效的邊緣計算算法和可靠的云服務。
- 標準化與開源生態(tài):地圖數(shù)據(jù)的采集、制作、加密、交換格式亟需行業(yè)標準。開放平臺和部分開源地圖數(shù)據(jù)(如用于研發(fā)的基準數(shù)據(jù)集)將降低行業(yè)門檻,促進技術創(chuàng)新。這推動了相關開發(fā)工具鏈、仿真測試平臺及安全認證軟件的繁榮。
- 高集成度硬件與專用芯片:高精度地圖的實時渲染、定位匹配和融合處理需要巨大算力。這催生了面向自動駕駛的專用計算芯片(如AI加速芯片、高精度定位SoC)和高度集成的域控制器硬件。它們的銷售與后續(xù)OTA升級服務,正成為產業(yè)鏈的重要環(huán)節(jié)。
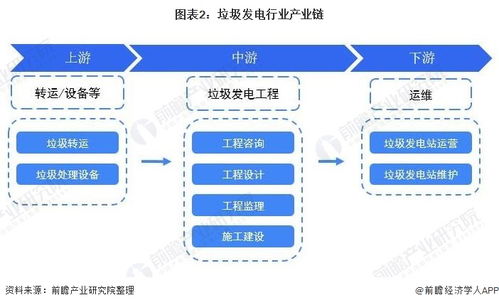
三、產業(yè)鏈視角:軟硬件開發(fā)及銷售的機遇
- 硬件層:高精度組合定位單元(GNSS/IMU)、激光雷達、數(shù)據(jù)采集車、車載高性能計算單元(HPC)的需求持續(xù)增長。銷售模式從單一硬件向“硬件+基礎軟件”套件或訂閱服務轉變。
- 軟件與數(shù)據(jù)層:地圖編譯、眾包更新、OTA管理、云端仿真等平臺軟件成為核心產品。數(shù)據(jù)合規(guī)、加密、交易平臺及相關服務是新的銷售增長點。
- 系統(tǒng)集成與解決方案:面向不同級別自動駕駛(如L2+輔助駕駛與L4 Robotaxi)提供定制化的“高精地圖+定位+感知”軟硬件一體化解決方案,是技術供應商的關鍵競爭力。
高精度地圖正從靜態(tài)背景板走向動態(tài)核心參與方。其發(fā)展軌跡與計算機軟硬件(特別是AI計算、邊緣計算、傳感器和芯片)的進步深度綁定、相互驅動。一個高效、安全、可擴展的自動駕駛系統(tǒng),必然是高品質地圖數(shù)據(jù)、先進算法與強大算力硬件三位一體的完美融合。對于開發(fā)者與銷售商而言,把握住“數(shù)據(jù)驅動、軟件定義、硬件支撐”的融合趨勢,才能在自動駕駛的浪潮中贏得先機。
如若轉載,請注明出處:http://m.xnkgtll.cn/product/41.html
更新時間:2026-04-08 15:03:14